AUTONOMOUS INTERSECTION MANAGEMENT
Autonomous intersection management is an alternative intersection control in which vehicle movements are individually coordinated. Vehicles use wireless communications to request an intersection movement at a specific time and speed from the intersection manager. The intersection manager simulates requests and accepts a non-conflicting subset. Vehicle connectivity is required for coordination, and automation is needed for precise adherence to trajectories.
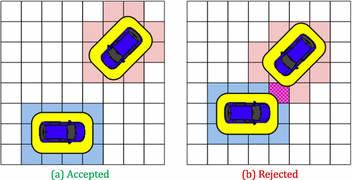
Illustration of tile-based reservations by Fajardo et al. (2011)
(COOPERATIVE) ADAPTIVE CRUISE CONTROL
Adaptive cruise control uses sensors and automation to control vehicle speed while maintaining a safe gap between the vehicle in front. Cooperative adaptive cruise control uses communications to coordinate acceleration and braking so that platoons of vehicles can maintain reduced spacing at freeway speeds. Reduced following headways increase road capacity.
Connected vehicle communications can be used to communicate time-dependent changes in lane direction or type, and automation can be required to obey such changes. Frequent changes in lane direction could improve capacity allocation during peak hours, and dynamic transit lanes could provide bus priority while permitting use of right-of-way at other times.
Illustration of dynamic lane reversal by Hausknecht et al. (2011)
Related Papers
Related Papers
- M. W. Levin, D. Rey, & A. Schwartz (2019). Max-pressure control of dynamic lane reversal and autonomous intersection management. Transportmetrica B: Transport Dynamics, 7(1), 1693-1718.
- M. W. Levin & A. Khani (2018). Dynamic transit lanes for connected and autonomous vehicles. Public Transport, 10(3), 399-426.
- M. W. Levin & S. D. Boyles (2016). A cell transmission model for dynamic lane reversal with autonomous vehicles. Transportation Research Part C: Emerging Technologies, 68, 126-143.
- M. Duell, M. W. Levin, S. D. Boyles, & S. T. Waller (2016). Impact of autonomous vehicles on traffic management: Case of dynamic lane reversal. Transportation Research Record: Journal of the Transportation Research Board, (2567), 87-94. (Finalist, 2016 Stella Dafermos Best Paper Award).
SHARED AUTONOMOUS VEHICLES
Instead of autonomous vehicles being owned privately, they might instead be used as part of a ridesharing service. Without the need to pay a driver, the cost may be competitive to personal vehicles. Shared autonomous vehicles create many different challenges, such as how to match passengers to vehicles, and how to coordinate vehicle route choice. If the fleet of shared autonomous vehicles is sufficiently large, they may contribute significantly to congestion.

TRAVEL DEMAND
Autonomous vehicles permit hands-free driving, and vehicles could even travel empty. Travelers may be willing to drive more, live farther from work, or avoid parking costs by sending their vehicle on empty trips to park elsewhere. Overall, autonomous vehicles could cause increases in the number and length of trips, resulting in significant increases in travel demand.
MAX-PRESSURE INTERSECTION CONTROL
Max-pressure intersection control models the network as a Markov decision process; queue lengths are the state, traffic signals are the control variables, and stochasticity comes from entering demand and turning ratios. Rather than solve it numerically (which would be computationally intractable due to the curse of dimensionality), max-pressure control proves that an analytical pressure-based adaptive signal control results in a positive recurrent Markov chain if at all possible. Equivalently, network outflow = inflow for max-pressure control if it could be achieved by any signal timing. Furthermore, max-pressure control is decentralized; each intersection optimizes its own timing based on the surrounding vehicle queues.
PARKING RESERVATION SYSTEMS
Up to 40% of travel times and 34% of urban congestion is caused by searching for parking. Previous studies have designed and implemented internet-based parking reservation systems that allow drivers to reserve parking for future times before arriving at their destination. I'm interested in optimizing the behavior of individual users and predicting the effects of widespread use of parking reservation systems on traffic networks.

DYNAMIC MICROTOLLING

In static flow models, marginal cost tolls have been shown to induce system optimal route choice. For dynamic or non-recurrent congestion, dynamic microtolling could encourage vehicles to avoid congested roads. For instance, raising the toll on an incident link would induce diversions. Computer-aided route guidance with real-time updates of toll changes is necessary to anticipate and respond effectively to dynamic microtolling.
CYBERSECURITY
The increasing reliance on computer systems in transportation also increases their vulnerability to cyber-attacks. Unfortunately, many currently used systems are poorly protected. Traffic signals are notoriously easy to hack, and have been intentionally disrupted by protesters. Variable message signs were hacked to warn drivers of zombies ahead. Although so far only minor impacts on traffic have been experienced, coordinated attacks on signal infrastructure during peak periods could create gridlock delaying millions of travelers.

TRANSPORTATION AND THE ENVIRONMENT
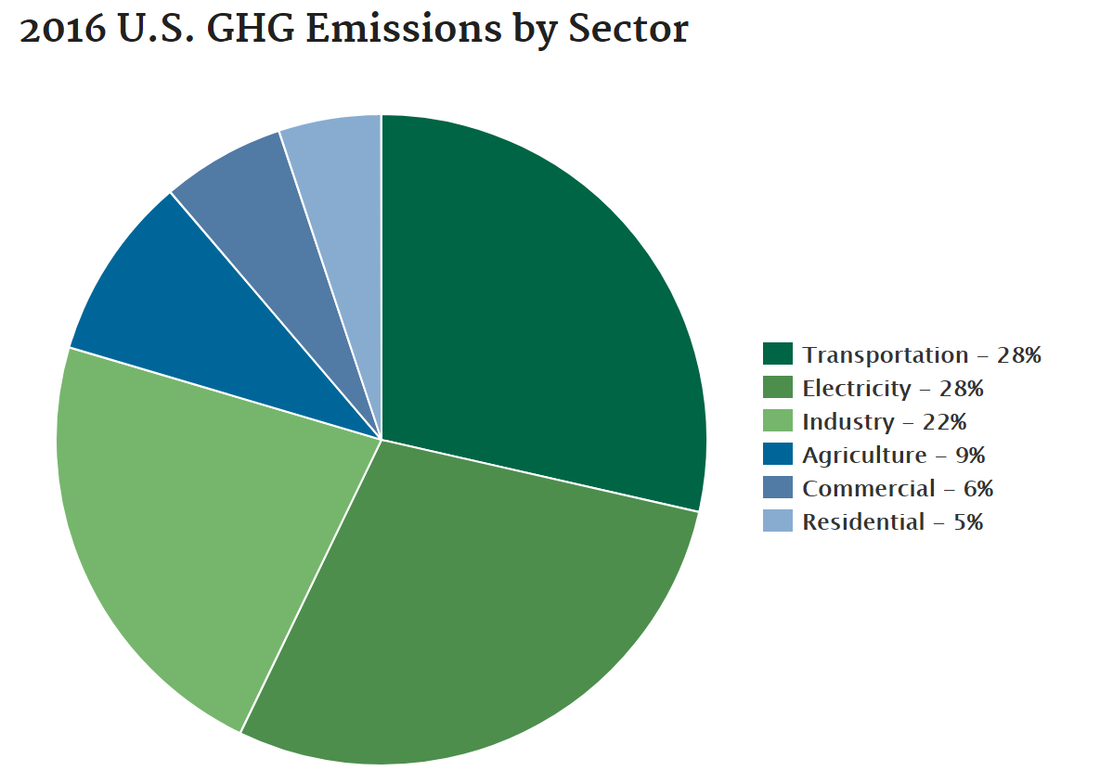
28% of U.S. greenhouse gas emissions were caused by transportation in 2016. New vehicle technologies such as autonomous vehicles and intelligent transportation systems could reduce the environmental impacts in several ways. Technologies that reduce congestion also improve the fuel efficiency. Autonomous vehicles could support alternative fuels such as electric vehicles through empty repositioning to improve access to recharging. Reservation-based intersection controls could reduce acceleration/deceleration cycles at intersections.
TRAFFIC ASSIGNMENT

SPONSORED PROJECTS

|
Cost/benefit analysis of fuel efficient speed control using signal phasing and timing (SPaT) data: evaluation for future connected corridor deployment, for MnDOT (with Zongxuan Sun) |
|
|
Extending Max-Pressure Control for Traffic Network Operations, for National Science Foundation |
|
|
Towards Implementation of Max-Pressure Signal Timing on Minnesota Roads, for LRRB |
COMPLETED PROJECTS
|
|
Generating Traffic Information from Connected Vehicle V2V Basic Safety Messages, for MnDOT (with John Hourdos) |

|
Improving intersection safety through variable speed limits for connected vehicles, for Roadway Safety Institute (with Chen-Fu Liao) |

|
Non-linear spacing policy and network analysis for shared-road platooning, for Center for Transportation Studies (with Rajesh Rajamani) |
|
|
Pressure-based dispatch for shared autonomous vehicles, for Center for Transportation Studies |
|
|
Bringing smart transport to Texans: ensuring the benefits of a connected and autonomous transport system in Texas, for TxDOT (PI: Steve Boyles) |
|
|
An assessment of autonomous vehicles: traffic impacts and infrastructure needs, for TxDOT (PI: Steve Boyles) |
|
|
Implications of automated vehicles on safety, design, and operation of the Texas highway system, for TxDOT (PI: Steve Boyles) |

|
Improving bus routing for KIPP charter schools, for D-STOP (PI: Steve Boyles) |